
In the ongoing saga of building my RepStrap 3D printer from salvaged printer parts...
The first axis is sorted out:

This is the printhead carriage salvaged out of a inkjet printer. It basically consists of a DC gear motor driving a tensioned belt, pulling the print carriage across a high resolution optical encoder strip.
There have been plenty of people do this before me, but this is my kick at repurposing salvaged printer parts.
 This is the print head circuit board from the carriage. In the center, you will see the solder pads for the Optical Encoder Sensor. My original intent was to keep the flat cables intact, and pull the signals off of those, but at about 50mil pitch... I can't even think about soldering that...
This is the print head circuit board from the carriage. In the center, you will see the solder pads for the Optical Encoder Sensor. My original intent was to keep the flat cables intact, and pull the signals off of those, but at about 50mil pitch... I can't even think about soldering that...
The first axis is sorted out:
This is the printhead carriage salvaged out of a inkjet printer. It basically consists of a DC gear motor driving a tensioned belt, pulling the print carriage across a high resolution optical encoder strip.
There have been plenty of people do this before me, but this is my kick at repurposing salvaged printer parts.
(yeah, I'm getting old)
As they have already done the work of wiring the IR LED with a resistor to VCC, all I really need is four wires. VCC/GND/Encoder Phase A and B.

The Optical Encoder provides logic level outputs to the Interrupt pins on the Arduino. The sketch below only addresses the X-AXIS for demonstration purposes, and only uses one Interrupt on Phase A, while polling the signal level on Phase B. This provides half the resolution capable from this Quadrature encoder.
In a future article, we will demonstrate using PinChange Interrupts to get the full resolution from this arrangement.
/**************************************************************************************** Lin_Enc_01.ino 04-29-2014 unix_guru at hotmail.com @unix_guru on twitter* http://arduino-pi.blogspot.com** This sketch allows you to run two salvaged printer carriages for X/Y axis using their* linear encoder strips for tracking.* Both interrupt routines are below, but for the sake of demonstration, I've only set up* the X-AXIS for now.******************************************************************************************/#include <Wire.h>#include <Adafruit_MotorShield.h>#include "utility/Adafruit_PWMServoDriver.h"#define frontstop = 100 // Right most encoder boundary#define backstop = 3600 // Left most encoder boundary// Create the motor shield object with the default I2C addressAdafruit_MotorShield AFMS = Adafruit_MotorShield();// Select which 'port' M1, M2, M3 or M4. In this case, M1Adafruit_DCMotor *myMotor = AFMS.getMotor(1);const int encoder1PinA = 2; // X-AXIS encoder 1 on pins 2 and 4const int encoder1PinB = 4;volatile int encoder1Pos = 0;const int encoder2PinA = 3; // Y-AXIS encoder 2 on pins 3 and 5const int encoder2PinB = 5;volatile int encoder2Pos = 0;boolean CarriageDir = 0; // Carriage Direction '0' is Right to leftbyte spd = 220; // Carriage speed from 0-255int newpos = 0; // Taget position for carriageint posrchd = 1; // Flag for target reachedint Pos1, Pos2;void setup() {Serial.begin(115200);Serial.println("Linear Encoder Test 04-29-2014");AFMS.begin(); // Set up MotorsmyMotor->run(BACKWARD); // Bring carriage to home position.myMotor->setSpeed(spd);delay(100);myMotor->run(FORWARD); // Bring carriage to home position.myMotor->setSpeed(0);attachInterrupt(0, doEncoder1, CHANGE); // encoder pin on interrupt 0 (pin 2)// attachInterrupt(1, doEncoder2, CHANGE); // encoder pin on interrupt 1 (pin 3)randomSeed(analogRead(0));}void loop() {static int oldPos1, oldPos2;uint8_t oldSREG = SREG;uint8_t i;cli();Pos1 = encoder1Pos;Pos2 = encoder2Pos;SREG = oldSREG;if(Pos1 != oldPos1){Serial.print("Encoder 1=");Serial.println(Pos1,DEC);oldPos1 = Pos1;}if(Pos2 != oldPos2){Serial.print("Encoder 2=");Serial.println(Pos2,DEC);oldPos2 = Pos2;}//sweep_carriage();if(posrchd) { // If target has been reached clear flag, and get new targetnewpos = random(200,3500);posrchd = 0;}posrchd = go_to_target(newpos);}/***************************************************************************************The following code was taken from http://forum.arduino.cc/index.php?topic=41615.20;wap2to utilize the fast port based encoder logic. Thank you Lefty!please go there for a full explanation of how this works. I have truncated the commentshere for brevity.***************************************************************************************/void doEncoder1() { // ************** X- AXIS ****************if (PIND & 0x04) { // test for a low-to-high interrupt on channel A,if ( !(PIND & 0x10)) { // check channel B for which way encoder turned,encoder1Pos = ++encoder1Pos; // CW rotationPORTD = PIND | 0x40; // set direction output pin to 1 = forward,}else {encoder1Pos = --encoder1Pos; // CCW rotationPORTD =PIND & 0xBF; // Set direction output pin to 0 = reverse,}}else { // it was a high-to-low interrupt on channel Aif (PIND & 0x10) { // check channel B for which way encoder turned,encoder1Pos = ++encoder1Pos; // CW rotationPORTD = PIND | 0x40; // Set direction output pin to 1 = forward,}else {encoder1Pos = --encoder1Pos; // CCW rotationPORTD =PIND & 0xBF; // Set direction output pin to 0 = reverse,}}PORTD = PIND | 0x80; // digitalWrite(encoderstep, HIGH); generate step pulse highPORTD = PIND | 0x80; // digitalWrite(encoderstep, HIGH); add a small delayPORTD = PIND & 0x7F; // digitalWrite(encoderstep, LOW); reset step pulse} // End of interrupt code for encoder #1void doEncoder2(){ // ************** X- AXIS ****************if (PIND & 0x08) { // test for a low-to-high interrupt on channel A,if (!(PIND & 0x20)) { // check channel B for which way encoder turned,encoder2Pos = ++encoder2Pos; // CW rotationPORTB = PINB | 0x01; // Set direction output pin to 1 = forward,}else {encoder2Pos = --encoder2Pos; // CCW rotationPORTD =PIND & 0xFE; // Set direction output pin to 0 = reverse,}}else { // it was a high-to-low interrupt on channel Aif (PIND & 0x20) { // check channel B for which way encoder turned,encoder2Pos = ++encoder2Pos; // CW rotationPORTB = PINB | 0x01; // Set direction output pin to 1 = forward,}else {encoder2Pos = --encoder2Pos; // CCW rotationPORTB =PINB & 0xFE; // Set direction output pin to 0 = reverse,}}PORTB = PINB | 0x02; // digitalWrite(encoder2step, HIGH); generate step pulse highPORTB = PINB | 0x02; // digitalWrite(encoder2step, HIGH); used to add a small delayPORTB = PINB & 0xFD; // digitalWrite(encoder2step, LOW); reset step pulse} // End of interrupt code for encoder #2/***************************************************************************************go_to_target() determines the distance and direction from current position to targetposition, then maps speed to decellerate close to the target so as not to overshoot.***************************************************************************************/int go_to_target(int target){int temp = 0;int delta = abs(Pos1-target); // Distance to targetspd = map(delta,3600,0,255,150); // Decellerate as you get closerif(target < 3600 && target > 100) {if(Pos1 < target) {myMotor->run(FORWARD);myMotor->setSpeed(spd);temp = 0;} else if(Pos1 > target) {myMotor->run(BACKWARD);myMotor->setSpeed(spd);temp = 0;} else temp =1;}return temp;}/***************************************************************************************sweep_carriage() is just a test routine to track back and forth testing overshoot.I will likely remove it soon.***************************************************************************************/void sweep_carriage(){if(CarriageDir == 0) { // Carriage Moving Right to Leftif (Pos1 < 3600) {myMotor->run(FORWARD);if (Pos1 > 3400) {myMotor->setSpeed(spd-80);} else myMotor->setSpeed(spd);} else {myMotor->setSpeed(0);CarriageDir = !CarriageDir;}} else { // Carriage Moving Left to Rightif (Pos1 > 100) {myMotor->run(BACKWARD);if (Pos1 < 300) {myMotor->setSpeed(spd-80);} else myMotor->setSpeed(spd);} else {myMotor->setSpeed(0);CarriageDir = !CarriageDir;}}}

This is the endstop sensor circuit. I haven't wired it up to the Arduino as yet, but it is pretty straight forward.
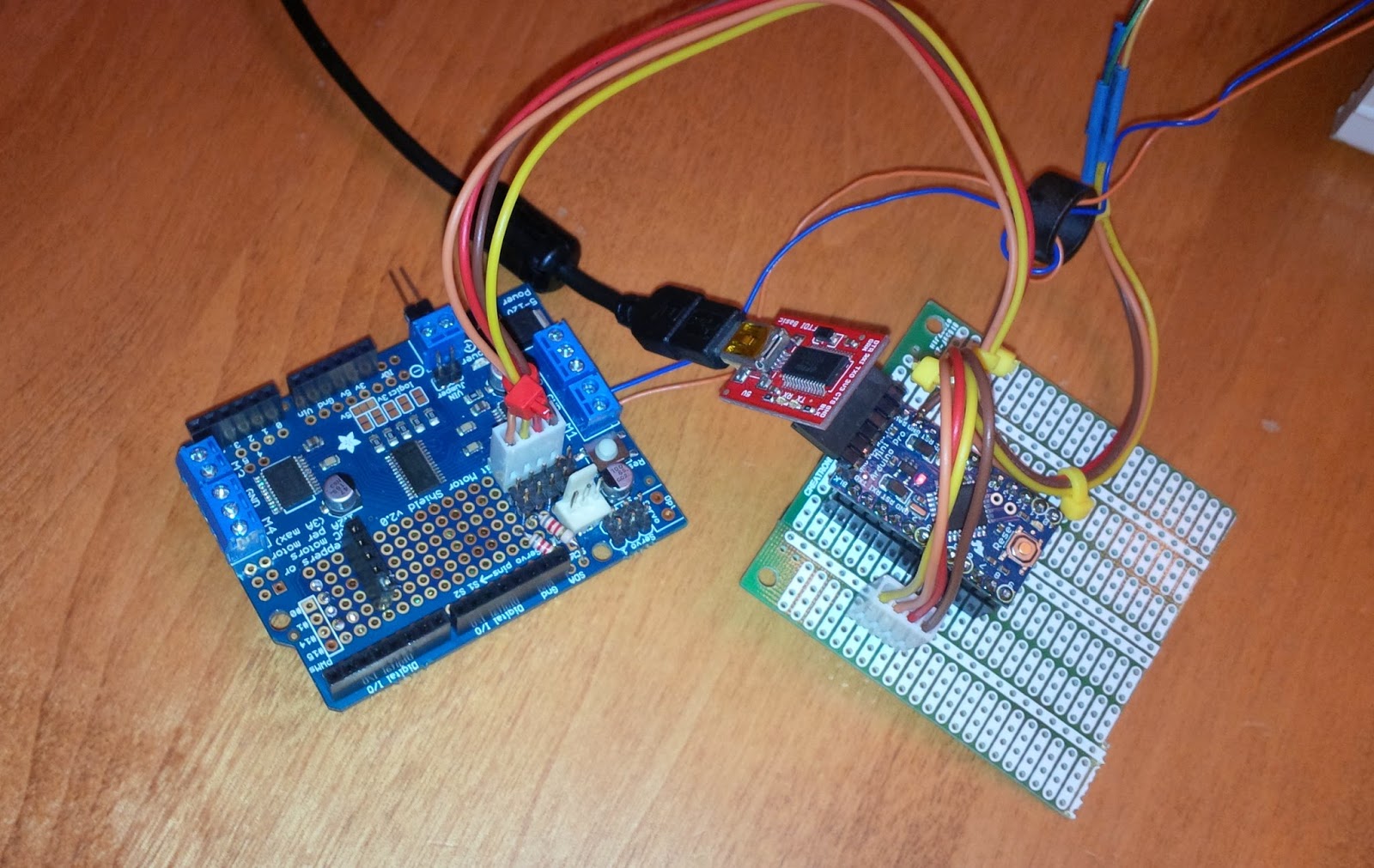
This is a wonderful board in that it contains TWO dual h-bridge FET drivers for four DC motors, or two steppers, or one stepper and two motors...

Wiring up the Optical Encoder. Only four wires are needed...

12volt DC gear motor used to drive the carriage assembly.
References:
http://playground.arduino.cc/Main/RotaryEncoders#OnSpeed
http://reprap.org/wiki/Optical_encoders_01
http://mechatronics.mech.northwestern.edu/design_ref/sensors/encoders.html
http://forum.arduino.cc/index.php/topic,17695.0.html
I like optical encoders too!
ReplyDeleteArduino-Pi Ramblings: Arduino Sketch To Manage High Resolution - High Speed Linear Encoders >>>>> Download Now
ReplyDelete>>>>> Download Full
Arduino-Pi Ramblings: Arduino Sketch To Manage High Resolution - High Speed Linear Encoders >>>>> Download LINK
>>>>> Download Now
Arduino-Pi Ramblings: Arduino Sketch To Manage High Resolution - High Speed Linear Encoders >>>>> Download Full
>>>>> Download LINK dn