
 Every 3D printer I've seen
Every 3D printer I've seen (please correct me if I've missed something!)
uses stepper motors for X/Y/Z axis.
The RepRap firmware assume that you are using steppers in your build.
That said, RepRap does introduce the concept of "RepStrap"
(from http://reprap.org/wiki/Category:RepStrap)
A repstrap is a 3D printer cobbled together from whatever parts you can find, which will eventually allow you to print the parts for a reprap machine, or to simply use as a stand alone machine. Derived from the term bootstrap, as in "to pull yourself up by your bootstraps"A RepStrap is a open-hardware rapid prototyping machine which is made by fabrication processes which aren't under the RepRap umbrella yet. These are becoming less and less common as RepRap printed parts become more available, but are still an option. You can build a 3D printer RepStrap using a tablesaw, orusing a lasercutter, and use this to make fun, beautiful, useful things.

Old commercial ink/laser printers used to use stepper motors too.
These printers typically got resolutions of 300dpi (0.08mm) or 600dpi (0.04mm)
But.... Newer printers, say within the last decade, use DC motors with a "linear strip encoder". And these printers typically get better than 1200dpi (0.02mm)
(yes, I know they use interpolation to get this resolution, but work with me here...)
According to WikiPedia: Optical linear encoders[1][2] dominate the high resolution market and may employ shuttering/Moiré, diffraction or holographic principles. Typical incremental scale periods vary from hundreds down to sub-micrometre and following interpolation can provide resolutions as fine as a nanometre.And...
Reprap already has a reference to these...
OverviewFor those who enjoy scavenging, many components useful for constructing 3D printers can be found in inkjet printers. This often includes optical encoders and strips. This page gives information on finding and using these items.
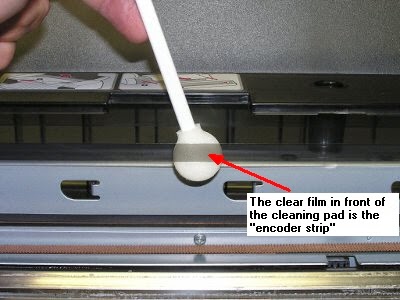
Finding printers with linear optical encoders in themCheap inkjet printers can be obtained from garage sales or recycling centers. Do not get laser printers, since they do not have the right optical components in them. Not all inkjet printers have optical encoders and strips in them. It is easy to tell by opening the lid (as if to change the ink). You should see a grey plastic strip close to the shiny metal rod and running parallel to it. The printers that people sell cheaply or recycle generally are somewhat inky inside. Do not get ink on the optical strip, though you may be able to clean it off.
The strip runs through the optical sensor, which may be quite hidden. It is probably on the back side of the assembly that holds the ink cartridges.
So...
I'm upping my game. My original goal was to simply copy a basic 3D printer using as much salvaged parts as I could, a few stepper motors, linear rails, switches, etc...
Had I done my research up front, I probably would not have even started this project, however... I have started, and am facing a new challenge...
My NEW GOAL is to create a 3D printer using DC motors and the salvaged Optical Encoder strips.
A simple test on the arduino with a pololu dual h-bridge quickly had two printer heads tracking back and forth on their carriages within minutes of wiring them up to their native cables. I haven't accounted for overrun yet, so they oscillate like crazy before getting to their destination, but this is DEFINITELY doable.
I will likely start with Marlin Firmware and write a hardware abstraction to convert stepper motor output (steps/inch, etc...) to run a closed loop DC motor with Encoder Strip feedback.
Any suggestions or prior art welcome!
Let's call these two videos ---
Inspiration....
References:
http://www.nextdayreprap.co.uk/wiring-reprap-prusa-mendel-build-manual/
http://en.wikipedia.org/wiki/Stepper_motor
http://reprap.org/wiki/Firmware
http://reprap.org/wiki/Category:RepStrap
http://benkrasnow.blogspot.ca/2010/02/linear-position-tracking-with.html
http://hackaday.com/2009/11/12/linear-optical-encoder/
http://reprap.org/wiki/Optical_encoders_01
http://www.electromate.com/db_support/downloads/lin.pdf
http://mil.ufl.edu/projects/gnuman/gnuman_pre2005/spec_sheets/heds_encoder.pdf
https://www.youtube.com/watch?v=0QLZCfqUeg4
http://makezine.com/2009/11/11/linear-optical-encoder-from-printer/
http://junkplusarduino.blogspot.ca/p/svg-image-plotter.html
http://madpenguin.ca/blog/2011/05/14/use-an-inkjet-printer-to-learn-emc2-and-servo-motor-control-part-1/
Arduino.cc: Agilent Optical encoder
Hi, i'm at the same situation. I have DC motors and Encoders, but stepper motors are very hard to be found here. You didn't put the end of the search, could you tell me what was the you find to done the project? Or if you done it or no.
ReplyDeleteArduino-Pi Ramblings: Using Dc Motors And Encoders For 3D Printer: Challenging The Norm! >>>>> Download Now
ReplyDelete>>>>> Download Full
Arduino-Pi Ramblings: Using Dc Motors And Encoders For 3D Printer: Challenging The Norm! >>>>> Download LINK
>>>>> Download Now
Arduino-Pi Ramblings: Using Dc Motors And Encoders For 3D Printer: Challenging The Norm! >>>>> Download Full
>>>>> Download LINK wK