
A big thank you to Miguel Sanchez for his help and inspiration.
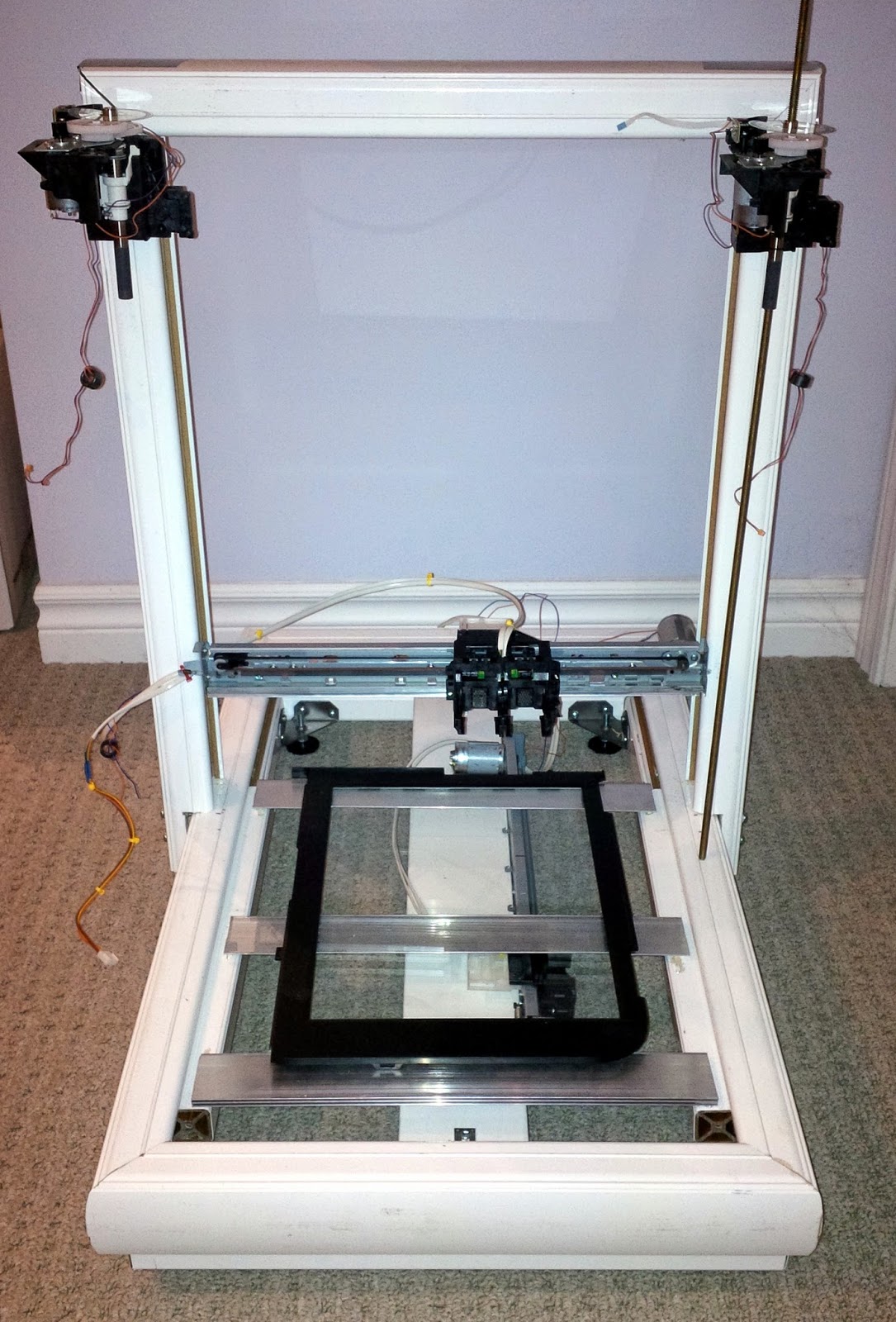
Here's a video snip of a quick demo showing the tuned X and Y carriages tracing out a simple 1500x1500 square. The purpose of this demo was to simply allow me to tune the PID parameters for each axis.
I'm currently torn between two separate development tracks. The first track is using the Beta6 version of the PID library, cascading Velocity and Position, and defining velocity profiles for each axis. I've had a fair bit of success in this track, and will publish code and results in a few weeks.
 However, the main track I'm following currently is to get my DC motor control on the Teensy 3.1, working within Teacup_firmware. For expedience and simplicity, this forces me to emulate a stepper at the moment, passing STEP/DIR commands from Teacup into my motor drive logic. The reason for splitting the tracks is that the cascaded PID control does not function well in small encoder increments. Ramp time in the Velocity PID is calculated from position delta... blah blah blah..
However, the main track I'm following currently is to get my DC motor control on the Teensy 3.1, working within Teacup_firmware. For expedience and simplicity, this forces me to emulate a stepper at the moment, passing STEP/DIR commands from Teacup into my motor drive logic. The reason for splitting the tracks is that the cascaded PID control does not function well in small encoder increments. Ramp time in the Velocity PID is calculated from position delta... blah blah blah.. My Teacup inspiration came from Nikki V's awesome blog series in when she builds a Teensy 3.1/RAMPS based 3D printer controller over the course of about a month. I highly suggest you go read through it.
Anyway.... I have had some difficulty (my own lack of awareness) in getting Teacup compiled properly on Ubuntu 14.10 for the Teensy. Yesterday, I opened issue #122 and was answered within hours!
I'm currently using the newest teensy3 folder from Paul Stoffregen's git repo https://github.com/PaulStoffregen/cores
Dave "drf5n" answered my logged issue, and set me straight. (It also looks like he's working on Marlin... I should ask him about that..)
I backed up and then removed the version of Teacup_firmware I was currently working from, then issued:
git clone https://github.com/Traumflug/Teacup_Firmware.git && cd Teacup_Firmware
git co teensy3
$ cp config.teensy3.h config.h $ cp ThermistorTable.single.h ThermistorTable.h $ cp Makefile-teensy3 Makefile $ make
Tonight's plan is to modify the config.teensy3.h file to properly reflect the Teensy pinouts for the hardware configuration I have built.
References:
https://community.freescale.com/thread/320695
http://reprap.org/wiki/Teacup_Firmware
https://github.com/Traumflug/Teacup_Firmware
https://github.com/Traumflug/Teacup_Firmware/issues/122
http://www.idt.mdh.se/kurser/ct3340/ht09/ADMINISTRATION/IRCSE09-submissions/ircse09_submission_22.pdf
https://community.freescale.com/thread/320695
http://reprap.org/wiki/Teacup_Firmware
https://github.com/Traumflug/Teacup_Firmware
https://github.com/Traumflug/Teacup_Firmware/issues/122
http://www.idt.mdh.se/kurser/ct3340/ht09/ADMINISTRATION/IRCSE09-submissions/ircse09_submission_22.pdf
No comments:
Post a Comment